






















 |
4 Pole BLDC Planetarischer Bürstenloser Dc-Gangmotor für Möbel / Medizin / Industrie
Produktdetails:
| Herkunftsort: | Dongguan, China |
| Markenname: | UCHI |
| Zertifizierung: | Completed |
| Modellnummer: | 42JXE100K/B4260 |
Zahlung und Versand AGB:
| Min Bestellmenge: | 1000 Stück |
|---|---|
| Preis: | Verhandlungsfähig |
| Verpackung Informationen: | Standards |
| Lieferzeit: | 5-7 Tage |
| Zahlungsbedingungen: | T/T, Western Union |
| Versorgungsmaterial-Fähigkeit: | 5000 Stück |
|
Detailinformationen |
|||
| Zahl der Polen: | 4 | Betriebsbereich: | 9V bis 16V |
|---|---|---|---|
| Drehmoment g.cm: | 370 | Anwendungsbereich: | Möbel/Medizin/Industrie |
| Bescheinigung: | 3C | Leerlaufdrehzahl r/min: | 6000 |
| Nichtlaststrom mA: | 680 | Nenngeschwindigkeit r/min: | 5000 |
| Nennleistung W: | 19,0 | Zahl der Phase: | 3 |
| Hervorheben: | Brustloser Gleichspannungsmotor für Möbel,Medizinischer bürstenloser Gleichspannungsmotor,Industrie-Dc-Planetenantriebsmotor |
||
Produkt-Beschreibung
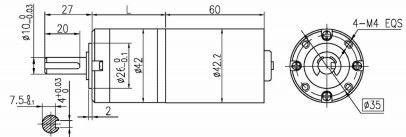
Zulässige Lastbereiche: 1 N.m. bis 10 N.m.
![]()
Technische Daten für Bürstenlose Motoren
| TYPE | Zahl mit einem Durchmesser von |
Zahl der Phase |
Betrieb Reichweite |
Bewertet Spannung VDC |
Nicht belastet Geschwindigkeit r/min |
Nicht belastet Strom mA |
Bewertet Drehmoment g.cm |
Bewertet Geschwindigkeit r/min |
Bewertet Strom Eine |
Bewertet Leistung W |
||||||||||||||||
| B4260-1260 | 4 | 3 | 9V bis 16V | 12 | 6000 | 680 | 370 | 5000 | 2.8 | 19.0 | ||||||||||||||||
| B4260 bis 2460 | 4 | 3 | 9V bis 26V | 24 | 6000 | 350 | 370 | 5300 | 1.4 | 20.1 | ||||||||||||||||
Technische Daten für Bürstenlose Getriebe
1.B4260-1260 BLDC-Motor
| Reduzierungsquote | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Anzahl der Getriebe | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Länge ((L) | mm | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Drehzahl ohne Last | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Nenngeschwindigkeit | r/min | 1348 | 965 | 357 | 263 | 185 | 98 | 70 | 50 | 36 | 28 | 23 | 20 | 16 | 14 | 12 | 10 | |||||||||
| Nenndrehmoment | N.m. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| Max. zulässige Last in kurzer Zeit | N.m. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
2. B4260-2460 BLDC-Motor
| Reduzierungsquote | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Anzahl der Getriebe | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Länge ((L) | mm | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Drehzahl ohne Last | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Nenngeschwindigkeit | r/min | 1429 | 1023 | 379 | 279 | 196 | 104 | 75 | 53 | 38 | 29 | 24 | 21 | 17 | 15 | 12 | 11 | |||||||||
| Nenndrehmoment | N.m. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| Max. zulässige Last in kurzer Zeit | N.m. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
Drahtdiagramm
![]()
PIN 1# Feedback n=60 * F/P, wobei F die Feedback-Ausgangsfrequenz darstellt und P 4 Paar Motorpfostenpaare.
PIN 2# Bremssteuerung
PIN 3 # PWM-Geschwindigkeitsregelung, Eingabe eines PWM-Signals von 20 bis 30 kHz und Anpassung der Drehzahl des Motors durch Anpassung des Arbeitszyklus.
PIN 4# Vorwärts- und Rückwärtsdrehung, Aufhängerdrehung ist CW, und Kurzschluss zur Bodendrehung ist CCW.
PIN 5# Negativpol der Stromversorgung
Der positive Pol (blaue Linie) des Motors ist mit dem positiven Pol der Stromversorgung verbunden, und der negative Pol (grüne Linie) des Motors ist mit dem negativen Pol der Stromversorgung verbunden.PIN3 # und PIN5 # sind miteinander verbunden, und der Motor läuft mit voller Geschwindigkeit.
Nach derselben Anforderung sollten PIN3 #, PIN4 # und PIN5 # beim Vorwärts- und Rückwärtsschalten miteinander verbunden sein.
![]()
PIN 3 # PWM-Geschwindigkeitsregelung, Eingabe eines PWM-Signals von 20 bis 30 kHz und Anpassung der Drehzahl des Motors durch Anpassung des Arbeitszyklus.
PIN 4#Vorwärts- und Rückwärtsdrehung, Hangdrehung ist CW, und Kurzschluss zur Bodendrehung ist CCW.
PIN 5#Negativer Stromanschluss